About the open-source gripper project
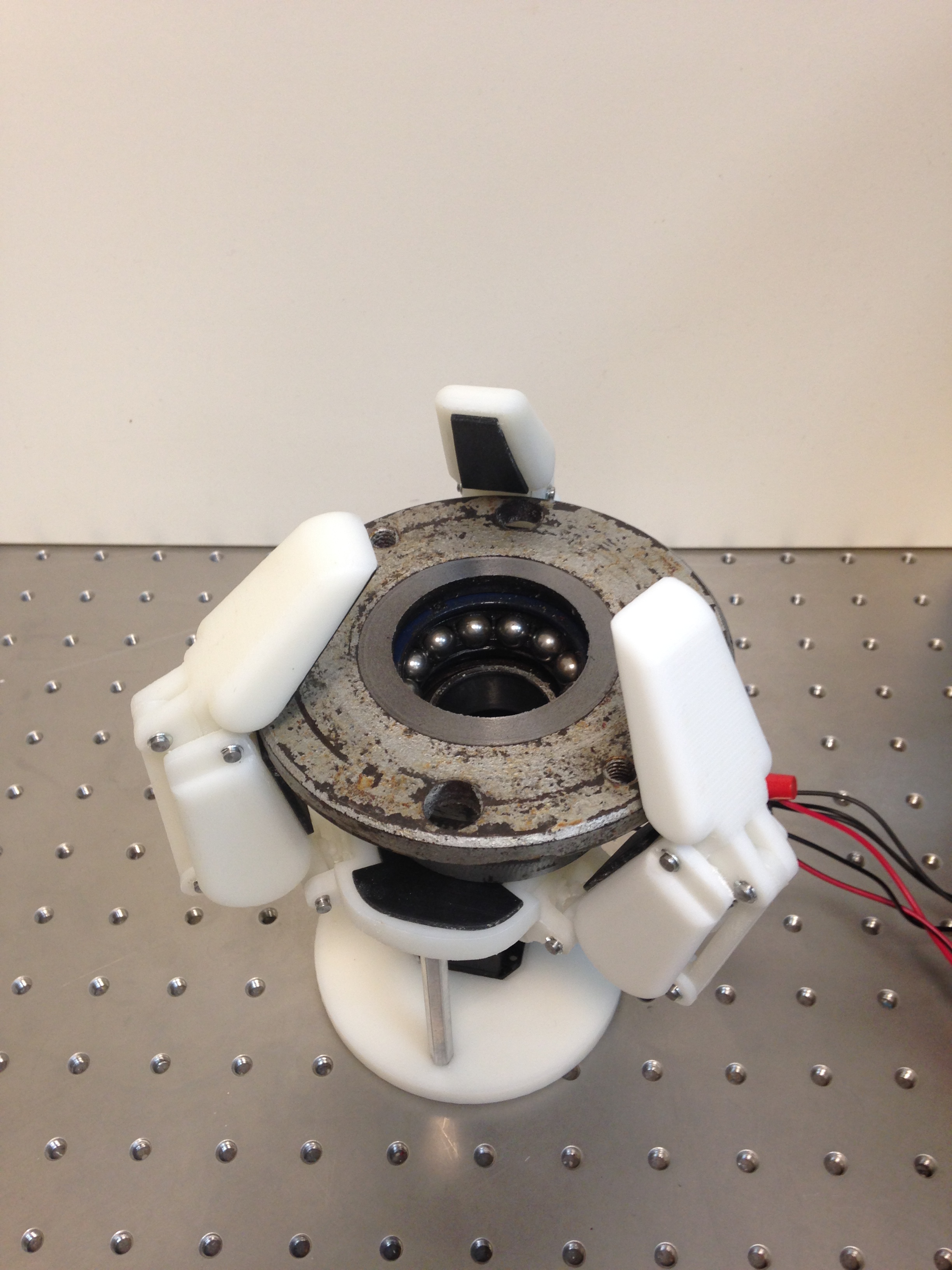
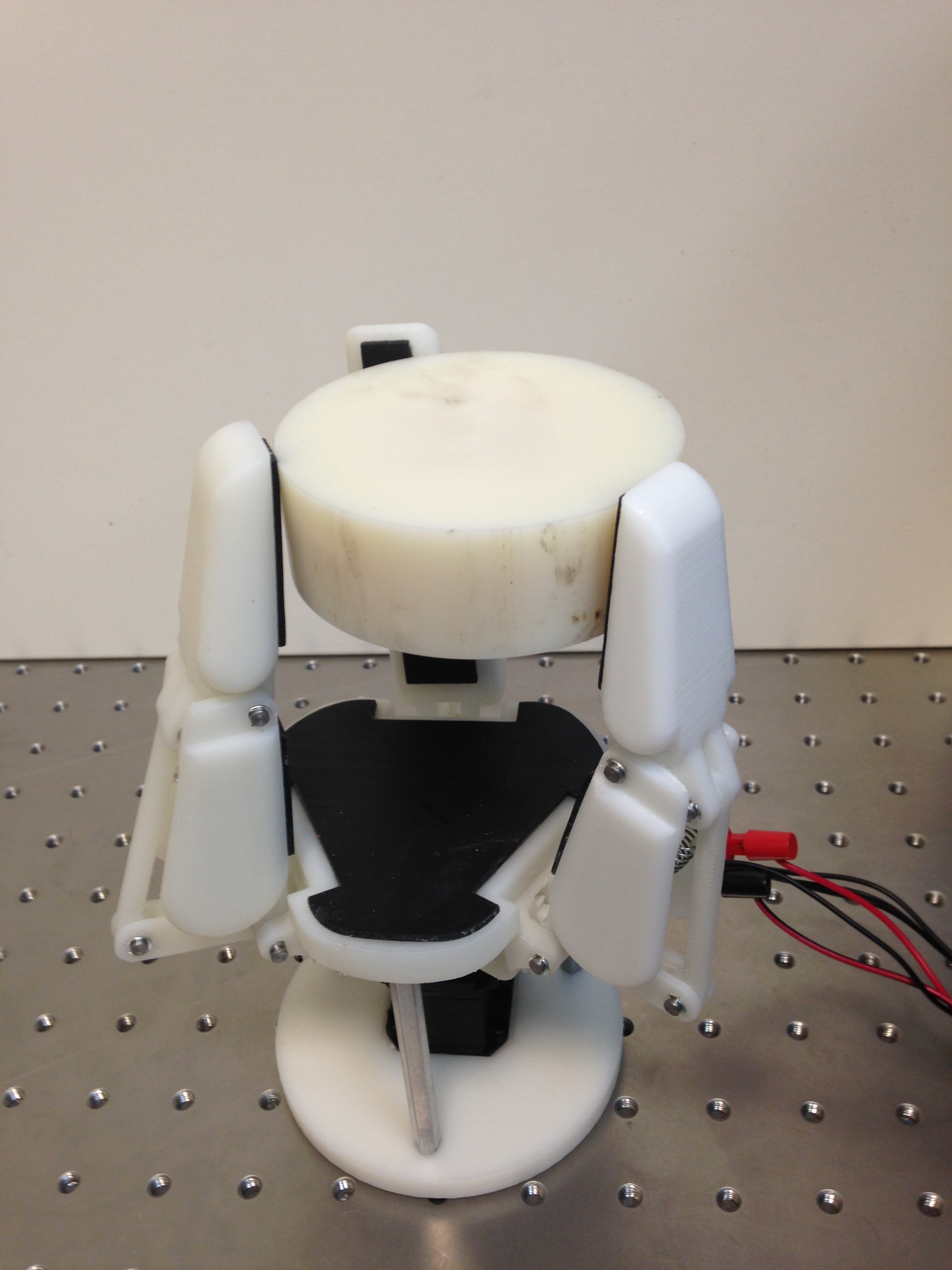
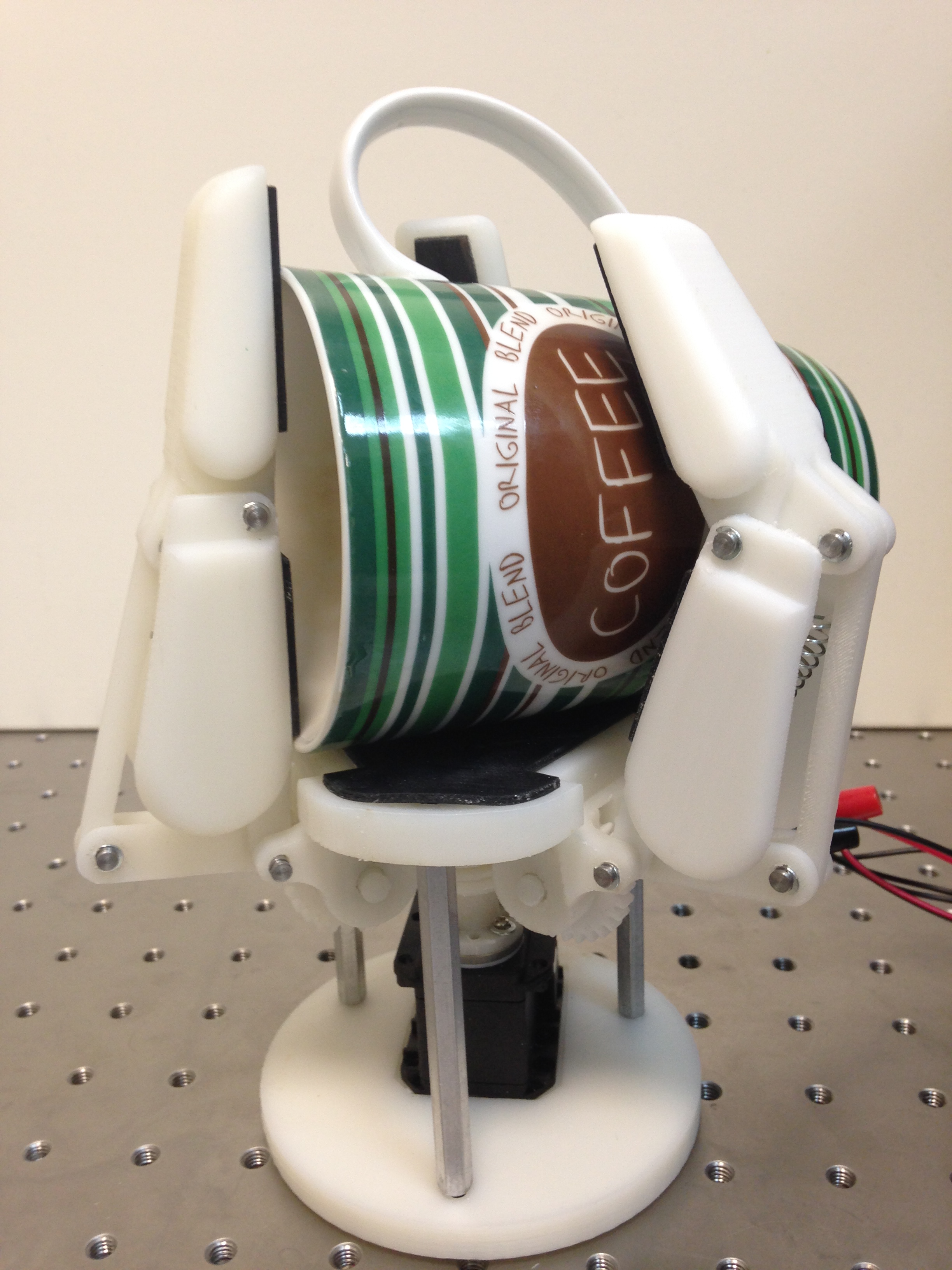
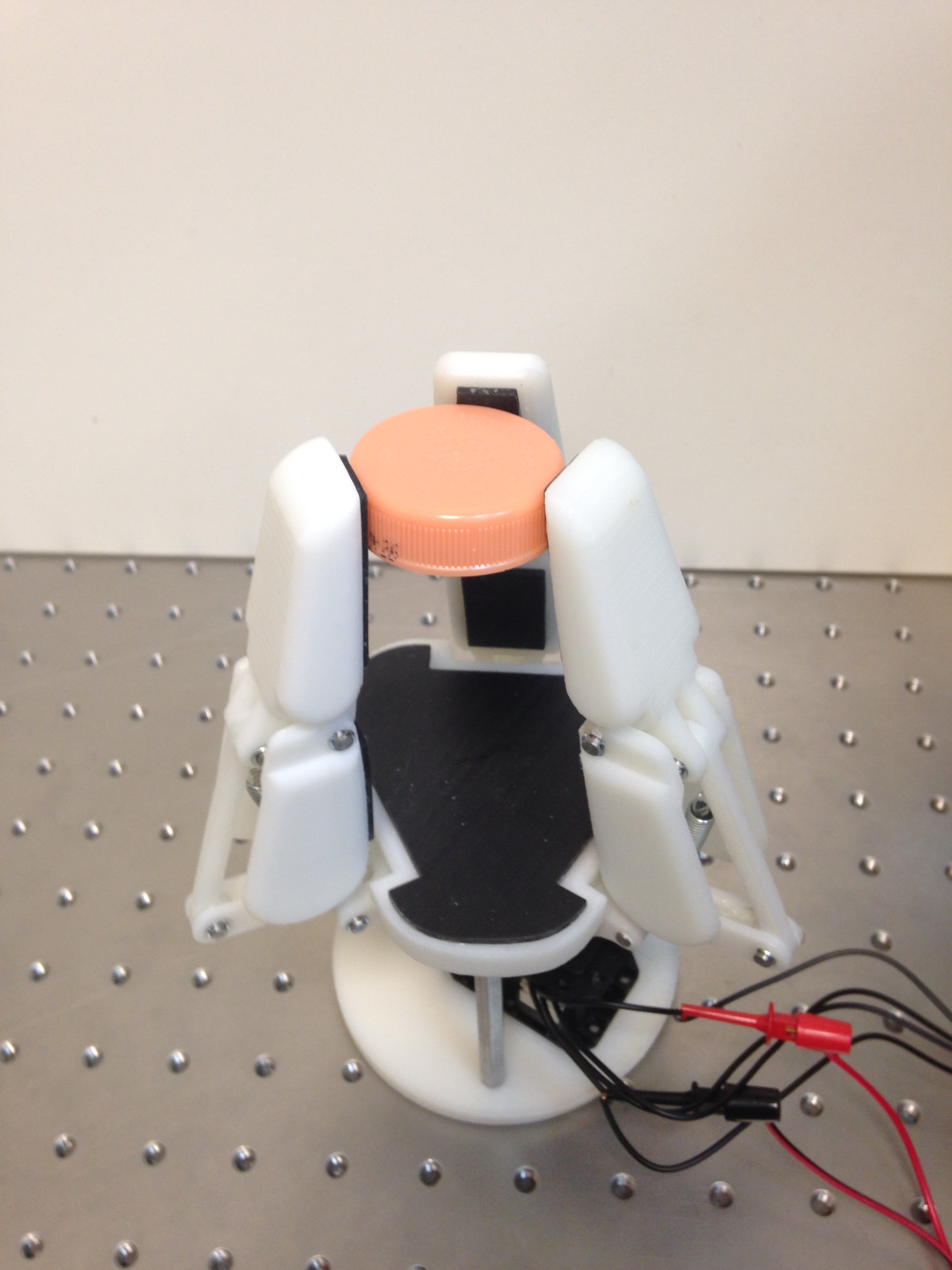
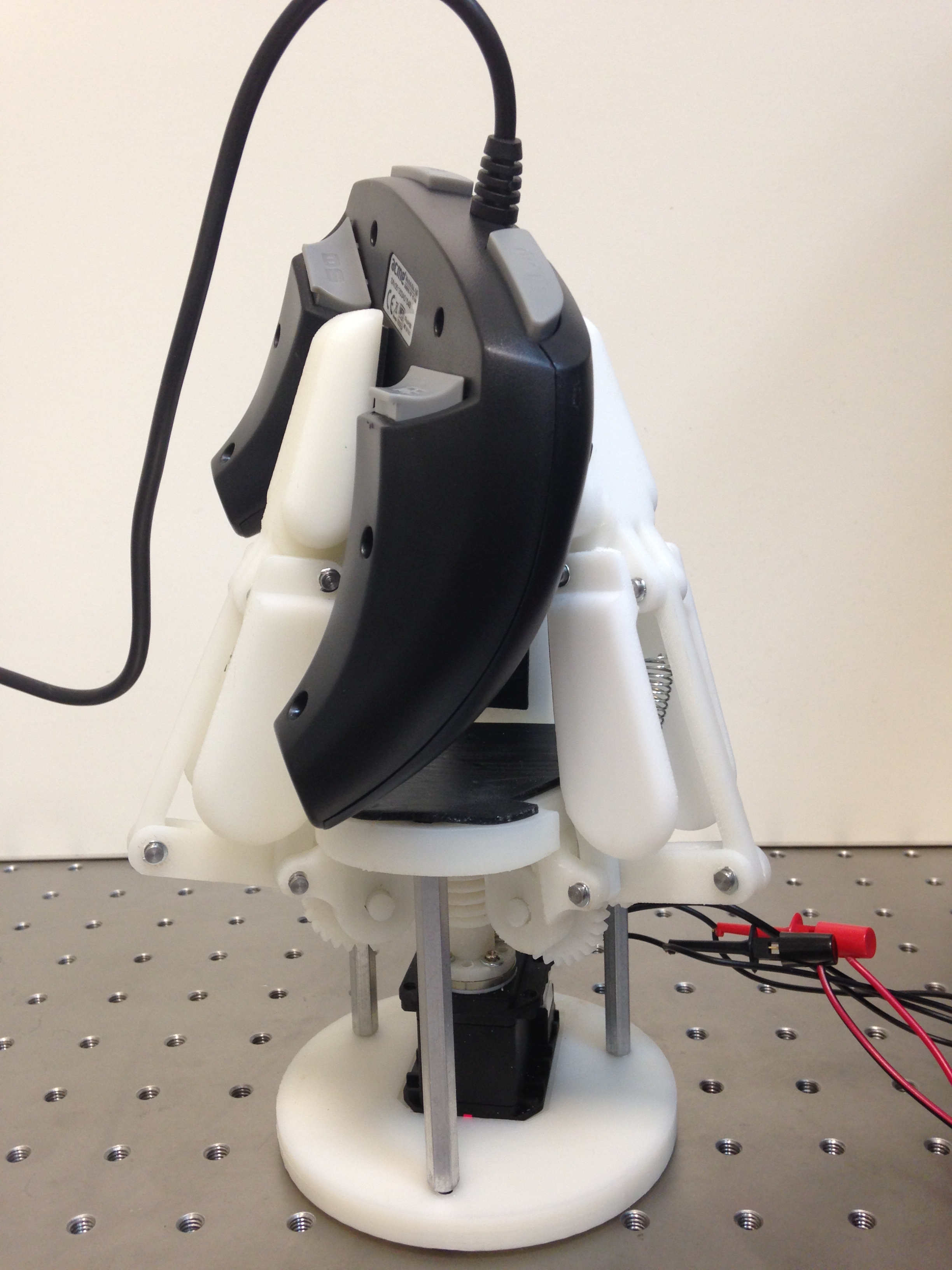
There are many simple designs of commercially available grippers for grasping cylindrical and spherical shape objects. In general, many of them do not accommodate extensive customization of the design features for attachment to different robotic arm platforms or integration of additional sensors for research purposes. To address such problems 3D printing rapid prototyping technology is actively applied for manufacturing of low-cost robotic hands. Aiming to provide a basic robotic platform with minimal number of 3D printed components and off-the-shelf actuator for facilitating robotic research efforts, a 3D printed open source robotic gripper has been developed. It utilizes a linkage based finger system and present an open source 3D printed underactuated three fingered robotic gripper. The simple three fingered robotic gripper would allow researchers modifying the design for both research and educational purposes. The 3D model of the gripper is created using SolidWorks software.
An underactuated mechanism is one which has fewer actuators than dofs. When applied to mechanical fingers, the concept of underactuation leads to selfadaptability. Selfadaptive fingers will envelope the objects to be grasped and automatically adapt to their shape with only one actuator and without complex control strategies. In order to obtain a determined system, elastic elements and mechanical limits must be introduced in statically underactuated mechanisms. While a finger is closing on an object, the configuration of the finger at any time is determined by the external constraints associated with the object. When the object is fully grasped, the force applied at the actuator is distributed among the phalanges.
Current results



Downloads
The gripper designed and modeled in SolidWorks, all files available here on ALARIS website, can be modified and reprinted on 3D printer.
Y. Tlegenov, K. Telegenov, A. Shintemirov, An Open Source 3D Printed Underactuated Robotic Gripper, The 10th IEEE/ASME International Conference on Mechatronic and Embedded Systems and Applications (MESA’14), Senigallia, Italy, September 2014.
The published paper is available on IEEE Xplore Digital Library. IEEE Xplore pdf bibtex
Telegenov, K.; Tlegenov, Y.; Shintemirov, A., A Low-Cost Open-Source 3-D-Printed Three-Finger Gripper Platform for Research and Educational Purposes, Access, IEEE , vol.3, no., pp.638,647, 2015
The article availabe at IEEE Xplore Digital Library. IEEE Xplore