Introduction
Vast number of people are suffering motor disfunction of the human upper limbs after stroke in Kazakhstan and worldwide. Thus, there is a high demand for rehabilitation devices. Rehabilitation robotic systems are recognized as efficient additions or alternatives to classical rehabilitation techniques. By integrating robotics into rehabilitation allows to relive therapists from labor intensive training sessions involving same repetitive tasks. Demonstrative performance assessment of patients during the therapy can be easily implemented and evaluated, which is not achievable with classical rehabilitation.
There is a wide range of robotic rehabilitation devices available for the stroke patient recovery. These devices have actuators that drive the system, giving an anthropomorphic movement, as well as interactivity (the ability to change working parameters, depending on the environmental conditions) which is achieved by the mounted sensors and based on the principle of biofeedback.
Many designs do not consider misalignment for the human wrist, most of the present architectures of wrist robots do not acknowledge the problems that arise when a human limb and an exoskeleton/end-effector are not properly aligned.
The proposed design passively adapts for misalignment thereby allowing to decrease user-device interaction forces.
Aims and objectives
This project aims to develop a novel concept of a 3- Self-Aligning Wrist Rehabilitation Robotic Device. This will be achieved by integrating compliance mechanisms between handle and flexion/extension group. The design will use open and simple mechanical structure thereby device offers simple connections to the human’s wrist. This will lead to light and portable structure.
Current results
– A 3DOF rehabilitation robot was designed in SolidWorks and then a 3D printed prototype was assembled to prove the concept.
– Denavit-Hartenberg parameters were found for future use in forward and inverse kinematics.
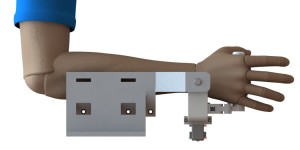

Rendered side view is SW and 3D printed prototype of the robotic device
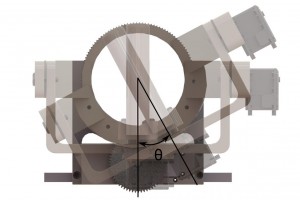
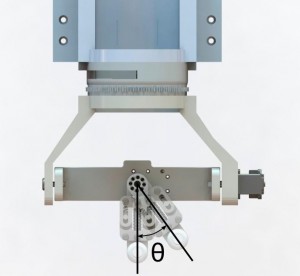
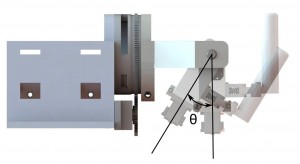
Rendered top, side and front views of the robotic device
Project Publications:
N. Omarkulov, K. Telegenov, M. Zeinullin, I. Tursunbek, A. Shintemirov, Preliminary Mechanical Design of NU-Wrist: a 3-DOF Self-Aligning Wrist Rehabilitation Robot, 6th IEEE RAS & EMBC International Conference on Biomedical Robotics and Biomechatronics (BioRob2016), Singapore, 2016 IEEE Xplore
Y. Ponomarenko, B. Aubakir, Sh. Hussain, A. Shintemirov, An End-Effector Based Upper-Limb Rehabilitation Robot: Preliminary Mechanism Design, 10th France – Japan Congress,8th Europe – Asia Congress on Mecatronics, Japan, November, 2014 IEEE Xplore pdf