Introduction
The project aims to create a low-cost 6-DOF anthropomorphic robotic hand. Over the last few decades, there were a great number of studies on developing and experimental trials of novel upper limb prosthesis designs. Aiming to provide more dexterous and advanced grasping capabilities, modern upper limb prostheses utilize advances of robotic hand research. There have been proposed various designs of underactuated artificial fingers based on mechanical linkage mechanisms. As linkage mechanisms consist of rigid links and transmission gears, the finger and hand kinematics can be modeled and solved as a standard kinematics problem for control purposes.
Current Results
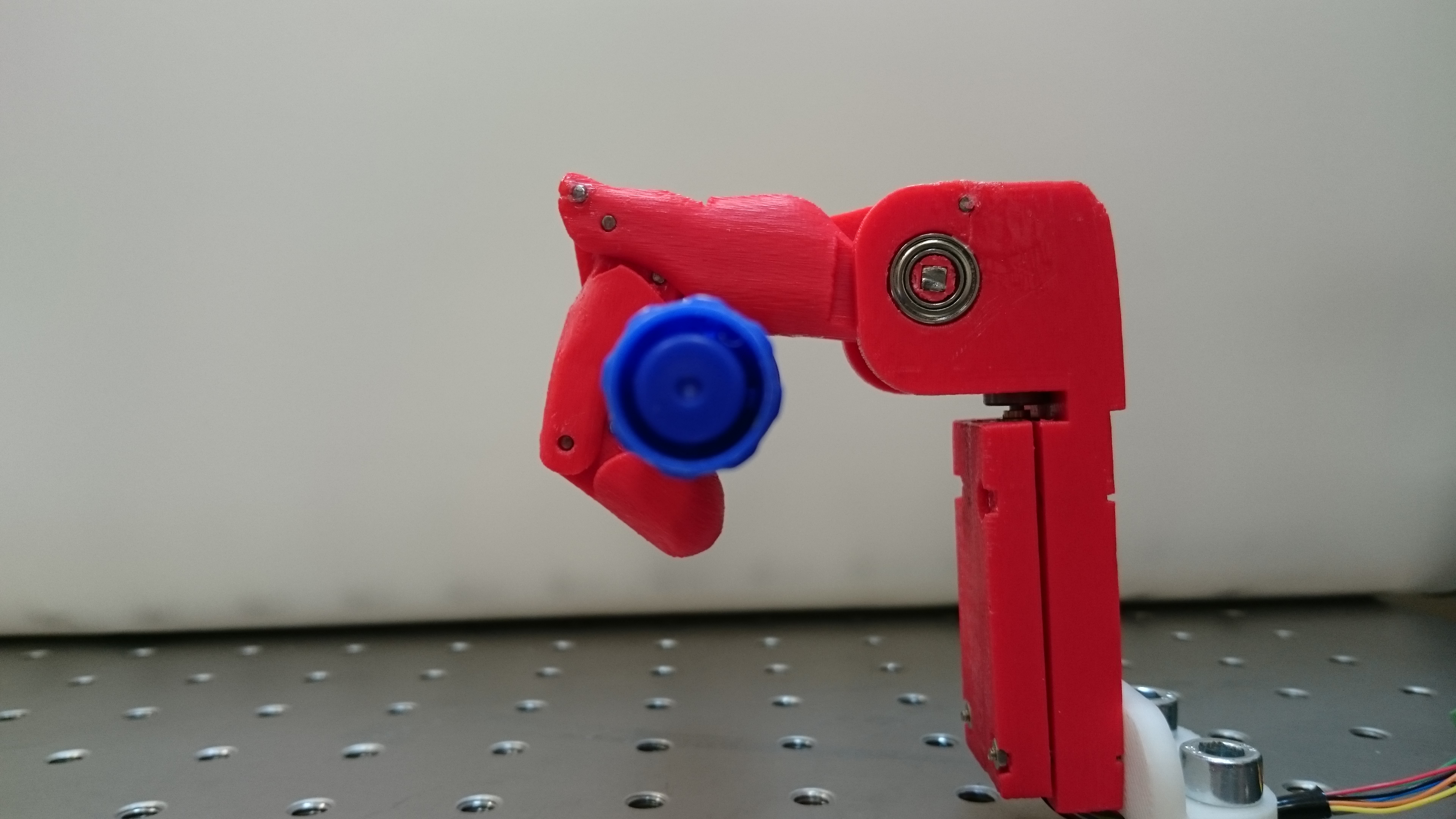
Presently, a lot of recently proposed tendon-driven prothesis prototypes and commercially available upper limb prostheses utilize the two-phalanx finger system. Finger distal phalanges in such finger mechanisms are rigidly combined with the intermediate phalanges under certain angle ensuring basic grasping capabilities of a prothetic hand. As part of the project we have developed a finger design consisting of three phalanges combined using four-bar linkage mechanisms. This results to larger workspace, enhanced gripping performance of the finger compared with the traditional two-phalanx finger designs, more natural grasp and finger movement as experientially demonstrated with the designed finger prototype.

Several iterations of the robotic hand design have been developed aiming to test various finger actuators and transmission options. Currently, a new version of the hand is being developed utilizing low-cost geared DC motors and hybrid tendon-linkage finger actuation.
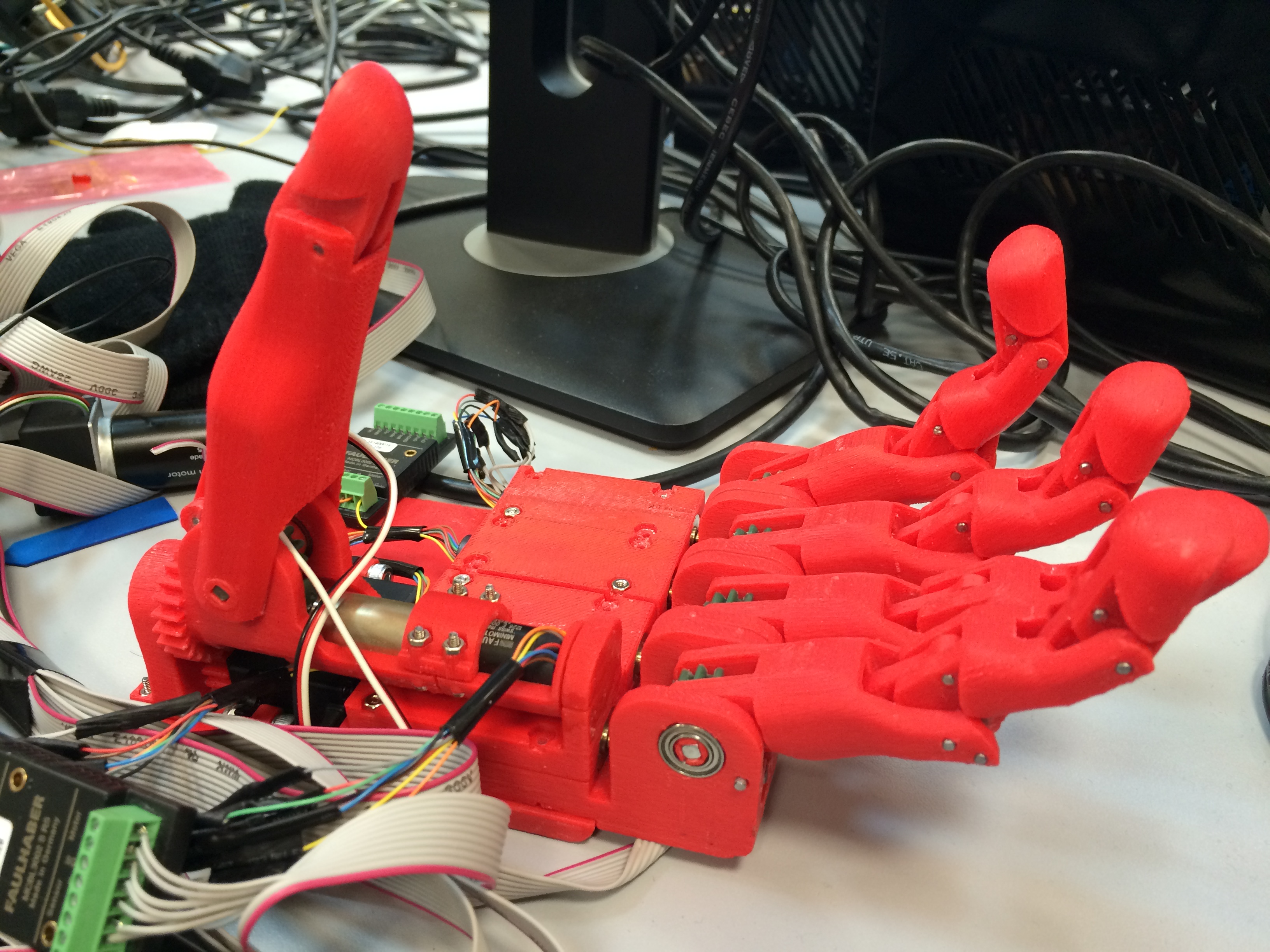
This final 6-DOF mechanical design of the hand, called the ALARIS Hand, is freely available for downloading from https://github.com/alarisnu/alaris_hand
The mechanical design of the ALARIS robotic hand design released for public use can serve as a low-cost design platform for further customization and utilization in research and education applications. Please cite the below work if you utilize our arm tracker design in your academic work:
A. Nurpeissova, T. Tursynbekov and A. Shintemirov, An Open-Source Mechanical Design of ALARIS Hand: A 6-DOF Anthropomorphic Robotic Hand, 2021 IEEE International Conference on Robotics and Automation (IEEE ICRA 2021), China, May 2021. pdf
Project Publications
A. Nurpeissova, T. Tursynbekov and A. Shintemirov, An Open-Source Mechanical Design of ALARIS Hand: A 6-DOF Anthropomorphic Robotic Hand, 2021 IEEE International Conference on Robotics and Automation (IEEE ICRA 2021), China, May 2021.
A. Oleinikov, B. Abibullaev, A. Shintemirov, M. Folgeraiter, Feature Extraction and Real-Time Recognition of Hand Motion Intentions From EMGs via Artificial Neural Networks, The 6th International Winter Conference on Brain-Computer Interface, South Korea, 2018 IEEE Xplore
N. Omarkulov, K. Telegenov, M. Zeinullin, A. Begalinova, A. Shintemirov, Design and analysis of an underactuated anthropomorphic finger for upper limb prosthetics, 2015 37th Annual International Conference of the IEEE Engineering in Medicine and Biology Society (EMBC), Milan, Italy, 2015 IEEE Xplore pdf