Introduction
Motion (orientation) control systems are widely used for mobile laser communication, aerial/shipboard video surveillance systems, mobile robots for emergency situations, defence modules and many others. Most of the motion systems for mobile applications are designed using a 2 axis pan-tilt platforms.
Along with acquiring general video image information, many modern systems employ a dynamical object tracking algorithms for various security and surveillance purposes. To achieve desired performance mobile pan-tilt based systems often employ a platform stabilization to compensate vibration of a mobile platform during movement. In most of the cases this is achieved by using inertial measurement units as part of the platform stabilization control systems, which adjust positions of the pan-tilt actuators accordingly.
Unfortunately, utilizing pan-tilt platforms in mobile applications for precise pointing and target tracking has significant disadvantage due to inherent rotation range limitations due to only two degrees of freedom available (pan and tilt rotations) for adjusting positions of the mounted sensor systems. To overcome this problem, several configurations of spherical parallel manipulators (SPMs) have been proposed for designing three degrees of freedom system of pure rotation for optimal camera orientations. Parallel manipulators are characterized by the fact that the end-effector is connected to the base via multiple kinematic chains.
Aims and Objectives
This project aims to develop a novel concept of a 3-axis internally stabilized motion control system suitable for mobile applications. This will be achieved by integrating a SPM design complemented by a novel quaternion-based inertial stabilization and orientation control system.
The motion control system prototype will be equipped with a high-speed optical sensor and installed on mobile robot platform for development and testing real-time maneuvering target tracking control in various scenarios. The project deliverables will advance the research on the design of a novel fast-speed inertially stabilized motion control platforms for mobile applications and will be ready for further utilization and commercialization.
Current results
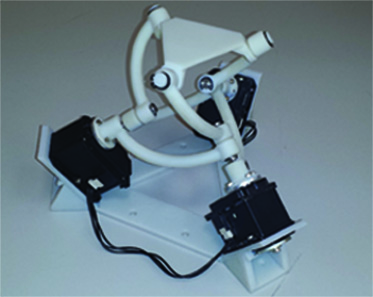
– A spherical parallel manipulator platfrom was designed in SolidWorks and then a 3D printed prototype was assembled to provide three degrees of freedom of pure rotation.
– A forward and inverse kinematics of the SPM mechanism was fully analyzed.
– A novel approach for SPM workspace definition was developed using convex optimization algorithms
– An open-loop minimum-time motion trajectory generation method of the SPM was developed using convex optimization algorithm
– An inertial stabilization and joystick control systems of the SPM prototype were developed.
Current research work focuses in kinematic analysis and orientation control of a special class of spherical parallel manipulators with coaxial input axes.
Project Publications:
I. Tursynbek and A. Shintemirov, Infinite Rotational Motion Generation and Analysis of a Spherical Parallel Manipulator with Coaxial Input Axes, Mechatronics, 2021, in press. pdf
I. Tursynbek and A. Shintemirov, Infinite Torsional Motion Generation of a Spherical Parallel Manipulator with Coaxial Input Axes, IEEE/ASME International Conference on Advanced Intelligent Mechatronics (IEEE/ASME AIM 2020), 2020 IEEE Xplore pdf
I. Tursynbek and A. Shintemirov, Modeling and Simulation of Spherical Parallel Manipulators in CoppeliaSim (V-REP) Robot Simulator Software, The International Conference “Nonlinearity, Information and Robotics”, Russia, 2020 IEEE Xplore pdf
I. Tursynbek, A. Niyetkaliyev and A. Shintemirov, Computation of Unique Kinematic Solutions of a Spherical Parallel Manipulator with Coaxial Input Shafts, 2019 IEEE 15th International Conference on Automation Science and Engineering (CASE), August 2019, IEEE Xplore pdf
T. Taunyazov, M. Rubagotti, A. Shintemirov, Constrained Orientation Control of a Spherical Parallel Manipulator via Online Convex Optimization, IEEE/ASME Transactions on Mechatronics, vol. 23, No. 1, pp. 252-261, 2018 IEEE Xplore
A. Shintemirov, A. Niyetkaliyev, M. Rubagotti, Numerical Optimal Control of a Spherical Parallel Manipulator Based on Unique Kinematic Solutions, IEEE/ASME Transactions on Mechatronics, Vol 21, No1, pp. 98-109, 2016 IEEE Xplore
A. Shintemirov, B. Omarali, F. Muratov, M. Issa, Sh. Salakchinov, T. Alizadeh, Y. Familiant, A Sensorless MPPT-based Solar Tracking Control Approach for Mobile Autonomous Systems, 42nd IEEE Industrial Electronics Conference (IEEE IECON2016), Italy, October 24-27, 2016 IEEE Xplore
B. Omarali, T. Taunyazov, A. Nyetkaliyev, A. Shintemirov, System Integration of a Solar Sensor and a Spherical Parallel Manipulator for a 3-Axis Solar Tracker Platform Design, 2015 IEEE/SICE International Symposium on System Integration, Nagoya, Japan, 2015, pp. 546-551 IEEE Xplore
A. Niyetkaliyev, A.Shintemirov, An Aproach for Obtaining Unique Kinematic Solutions of a Spherical Parallel Manipulator,The IEEE/ASME International Conference on Advanced Intelligent Mechatronics (AIM 2014) , Besancon, France, July 2014 IEEE Xplore pdf